A new vision-tactile sensor could help robots manipulate objects with foresight
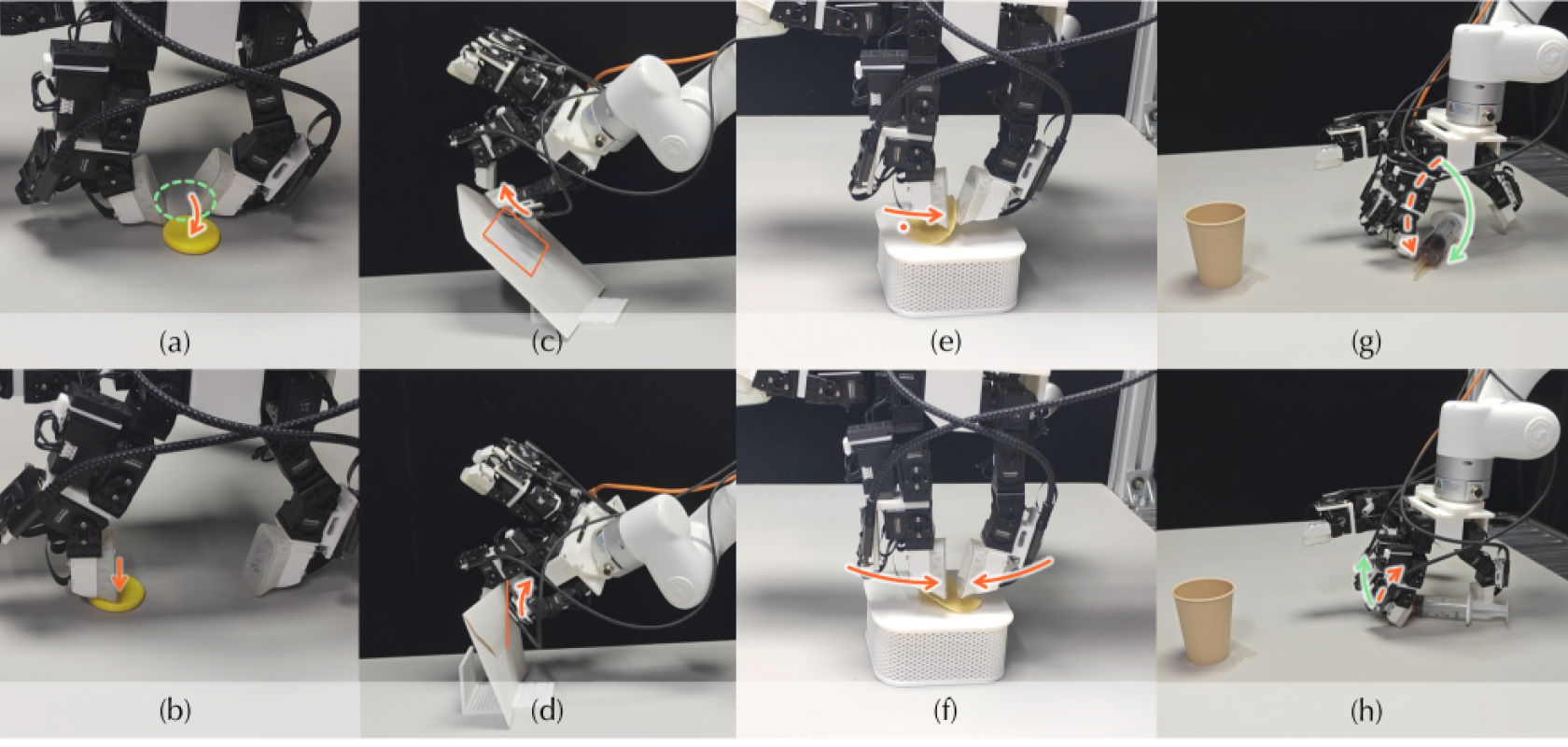
Failure cases: (a) coin away pushed away. (b) finger misses the coin. (c) failure to grasp letter. (d) failure to detect the envelope edge. (e,f) unstable contact and drop. (g) failure to reorient syringe. (h) failure to engage syringe edge (Image: arXiv)
The FingerEye sensor helps robots plan a manipulation strategy before contact is made
Register for FREE to keep reading
Join 10,000+ vision professionals driving innovation in automation, AI and imaging with:
- Expert insights on vision, robotics, AI & embedded tech
- Newsletters and features covering the full imaging landscape
- Visionaries series: leadership strategies in imaging
- Free panels on smart manufacturing & autonomy
- White Papers & updates for smarter integration
Sign up now
Already a member? Log in here
Your data is protected under our privacy policy.