3D SLAM mapping improved by MIT using submap AI vision
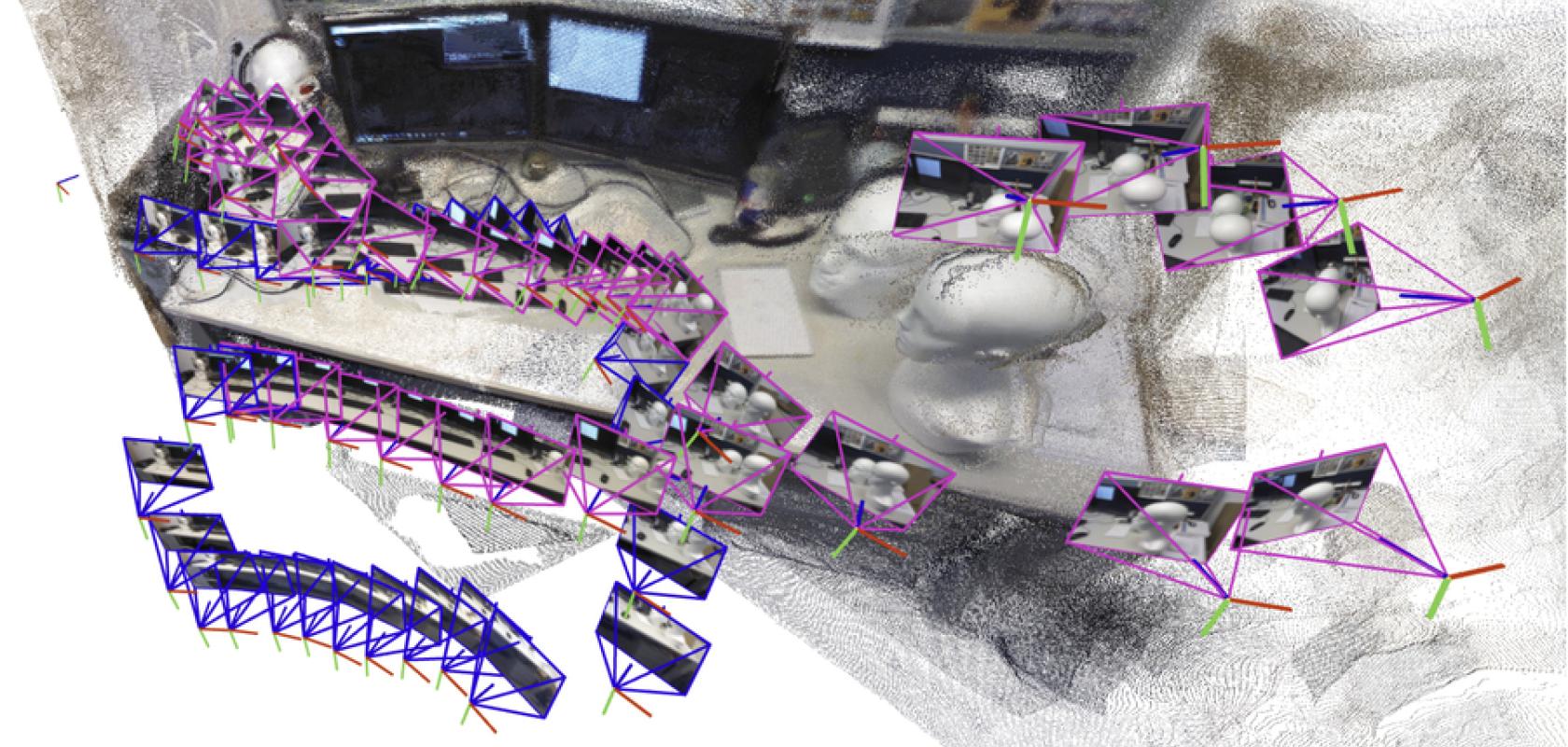
The artificial intelligence-driven system incrementally creates and aligns smaller submaps of the scene, which it stitches together to reconstruct a full 3D map, while estimating the robot’s position in real-time (Image: Dominic Maggio, Hyungtae Lim and Luca Carlone / MIT)
MIT has unveiled a fast submap-based AI vision system for real-time robotic 3D mapping
Register for FREE to keep reading
Join 10,000+ vision professionals driving innovation in automation, AI and imaging with:
- Expert insights on vision, robotics, AI & embedded tech
- Newsletters and features covering the full imaging landscape
- Visionaries series: leadership strategies in imaging
- Free panels on smart manufacturing & autonomy
- White Papers & updates for smarter integration
Sign up now
Already a member? Log in here
Your data is protected under our privacy policy.

