After speaking at AutoSens Detroit on 16 May, Nadav Haas, product manager at Israeli firm Newsight Imaging, gives his opinion on why the company’s CMOS solution is a good fit for lidar sensing in autonomous driving. The company recently announced high-volume production of its CMOS image sensors for automotive lidar using TowerJazz’s foundry in Israel.
Technical challenges encountered in automotive lidar systems include: detection of distant, faint, and transparent objects; achieving sufficient resolution at long range; obtaining high accuracy at both short and long ranges; immunity to blinding from sunlight and other light sources; and precise timing control. There is also a desire for low-cost systems with no moving parts and low power consumption.
Current lidar technologies such as rotating head scanners and MEMS devices involve moving parts, and therefore struggle to match strict automotive requirements, especially when moving towards advanced autonomous levels. Sensors used in current lidar systems such as SPADs enable long range. However, they are limited in resolution and have a hard time meeting the automotive requirement of identifying pedestrians at a range of 200 metres with a resolution of at least 20 pixels.
Newsight Imaging’s Enhanced Time-OF-Flight (eTOF) is a full CMOS solution for lidar designed to address all the challenges mentioned above. ETOF is a 3D solid-state device without moving parts. It is built in an all-in-one CMOS chip using detection, logic, processing and digital output, all on a single highly sensitive, small-footprint, low-cost chip.
The eTOF solution enhances the pulsed indirect time-of-flight range sensing method. In pulsed indirect time-of-flight, the distance of an object is sensed and detected by the range gating method. The potential range of the returned signal pulse is split into two sections.
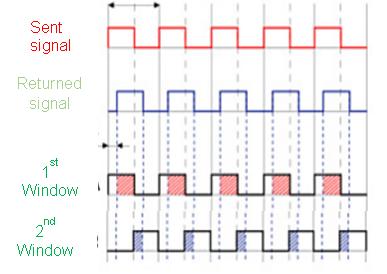
The returned signal is acquired by a first window aligned with the sent signal, resulting in integration of a portion of the returned signal labelled ‘A’. Immediately after, the returned signal is again acquired by a second window aligned with the end of the sent signal, resulting in integration of the other portion of the returned signal labelled ‘B’. The information about the distance is recovered by computing the ratio of the values of A and B, so distance is obtained by d=0.5*c*t*[B/(A+B)], where ‘c’ is the speed of light and ‘t’ is the width of the sent signal.
It is important to note that A and B values measure reflected light intensity, so an entire image is formed at each acquisition.
ETOF enhancement of the pulsed indirect time-of-flight method relies on the following main pillars: enhanced dynamic range, high accuracy at short range and long range, immunity to blinding from external light sources, and digital pulse timing control.
Enhanced dynamic range is intended to meet the challenge of detecting faint signals at long range without saturating from short-range objects that are highly reflective, while obtaining the necessary information to achieve sufficient resolution. In this method processing is done in the analogue domain. This means data is compressed and quantised with significantly less bits without losing any accumulated information and using standard processing tools. The result is significant amplification of weak signals, and thus high signal-to-noise ratio to achieve good resolution at long range.
High accuracy at short range and long range is achieved through a method of switching between various pulse widths and support algorithms. This enables a working mode capable of covering both short and long ranges with proper performance and good resolution.
Optical solutions are applied to mitigate blinding from ambient light and lights from other cars. Mitigation is done with minimal attenuation of the original laser, essential to achieve sufficient performance.
Digital timing control is essential to obtain precise transmitted and received pulses. An ultra-compact, ultra-fast current sourcing pulsed laser driver is being developed. Output pulses are symmetrical and fully controlled in amplitude and duration. With this technology rise-time and fall-time are limited only by the laser turn-on delay.
Related article:
Real commitment for lidar from automotive OEMs - Lidar could become an important part of autonomous driving and potentially a huge market opportunity for laser and detector manufacturers, as Greg Blackman discovers at the Image Sensors conference in London
